


新闻中心
NEWS CENTER
塑壳断路器操作机构特性及运动原理
发布时间:
2021-04-21
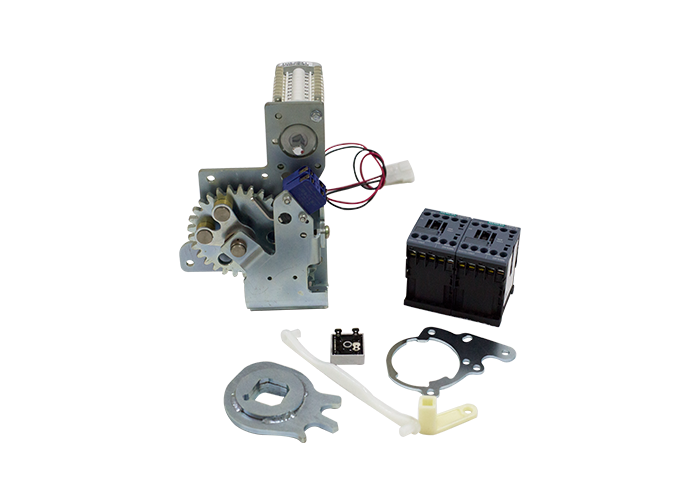
塑壳断路器主要由操作机构、接触系统、灭弧系统和支架组成。操作机构是塑壳断路器执行通断动作指令的主要机械部件,为塑壳断路器的可靠开合提供能量。因此,塑壳断路器的机械性能主要取决于操作机构的机械性能。
塑壳断路器主要由操作机构、接触系统、灭弧系统和支架组成。操作机构是塑壳断路器执行通断动作指令的主要机械部件,为塑壳断路器的可靠开合提供能量。因此,塑壳断路器的机械性能主要取决于操作机构的机械性能。研究操动机构的力学性能,有助于我们了解塑壳断路器的操动机构。

操作机构的性能要求:塑壳断路器80%的故障经常发生在操作机构中。故障往往发生在人们没有意识到的地方,运行机制也不例外。很难监控操作机构的运行状况以进行故障排除,尤其是受湿度、温度、腐蚀等影响的室外环境中的设备。这将更容易导致操作机构的故障。因此操作机构的优化、新材料的应用、新工艺的改进和加工精度的提高是操作机构要解决的长期任务。
为了使塑壳断路器具有良好的机械和电气性能,作为其核心部件的操作机构应具备以下能力:1、具有稳定的开合能力,避免动、静触头在闭合时不能正常闭合的现象;2、动、静触头闭合时,保持动、静触头的闭合稳定性,即有适当的终压;3、开闭一致性好,避免频繁机械操作时出现故障;4、开合时间短,有利于提高产品的分断能力,及时断开故障电流;5、分合闸弹跳要小,避免跳弧烧损,提高接触电阻;6、超程值大,避免动、静触头烧毁后不稳定带电,避免危险;7、高机械寿命,反映断路器产品稳定性的关键指标;8、减少操作机构反复开合造成的疲劳断裂。

操作机构的运动学原理分析:虽然三维虚拟样机可以利用三维建模设计技术和Adams动力学仿真分析计算技术准确地模拟操作机构的运动,但操作机构的三维虚拟仿真是建立在对操作机构工作原理和运动的了解的基础上的。因此深入分析和了解断路器操作机构的工作原理和运动原理,不仅有助于提高优化设计的准确性,也有助于正确分析和解决试制、验证和生产中的各种问题。因此我们有必要应用力学原理和力学知识来分析塑壳断路器机构的关键静态位置。
操作机构作为塑壳断路器的重要外部附件,其设计应以产品可靠性和使用寿命为基础,向小型化、长寿命、高工作可靠性、远程控制、PC智能控制、节能和绿色环保方向发展。
上一页
上一页:
推荐新闻
2021-04-21
2021-04-14
2021-04-02
2021-03-17
2021-03-02